Researcher at Alibaba DAMO Academy, Ph.D. from Wuhan University, advised by Prof. Wen Yang and Prof. Gui-Song Xia.
My research focuses on Generative AI, Medical AI, Computer Vision, Deep Learning, in particular vision generation models and vision-language models.
Previously, I worked at Huawei on computer graphics and video generation models, and interned at SenseTime on object detection.
Projects
Selected Publications
Google Scholar citations: 3,581 Updated May 31, 2026
-
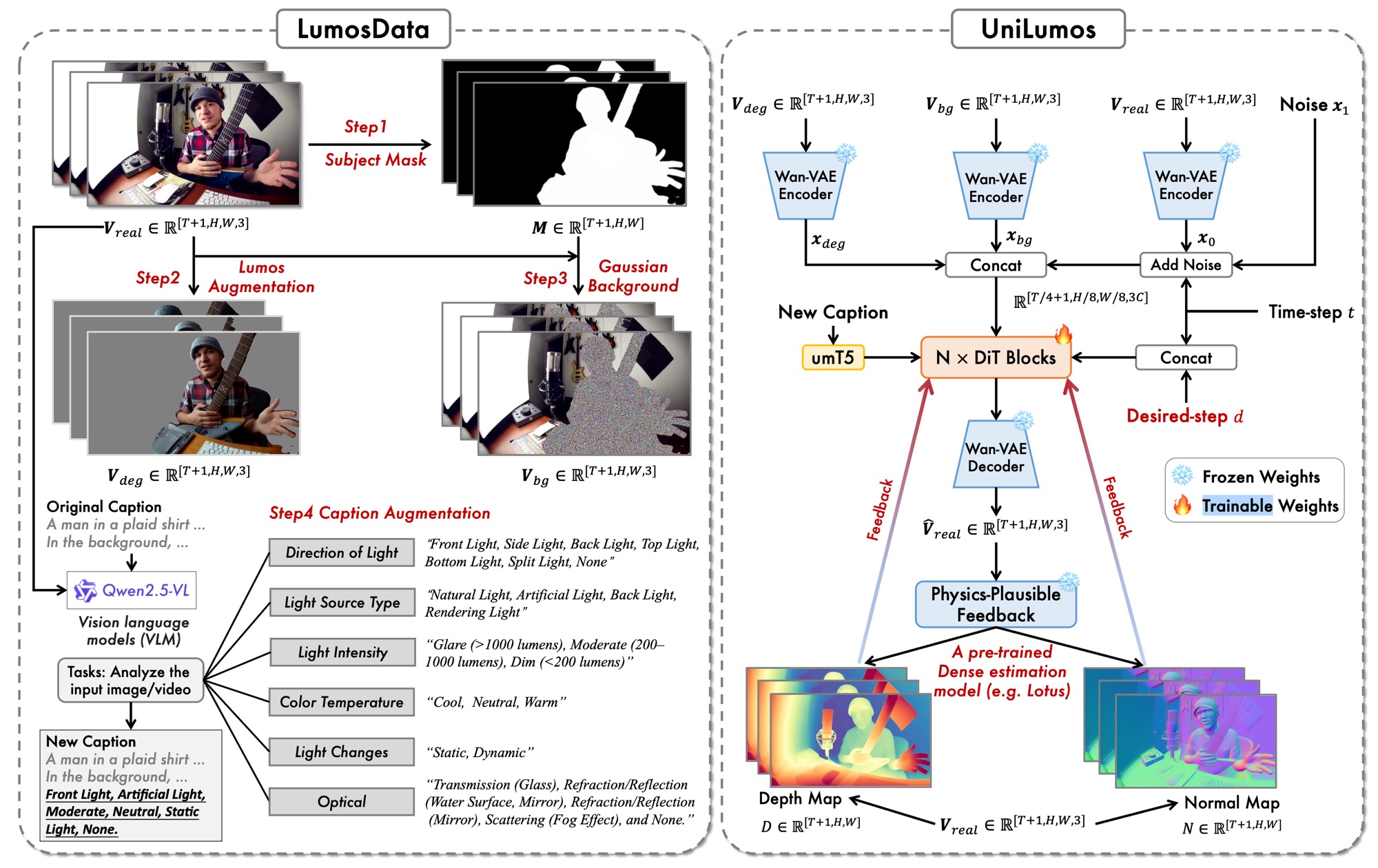
UniLumos: Fast and Unified Image and Video Relighting with Physics-Plausible Feedback
Pengwei Liu, Hangjie Yuan, Bo Dong, Jiazheng Xing, Jinwang Wang, Rui Zhao, Weihua Chen, and Fan Wang
NeurIPS, 2025.
Introduces a unified image and video relighting framework with physics-plausible feedback for fast, consistent, and controllable illumination editing.
-
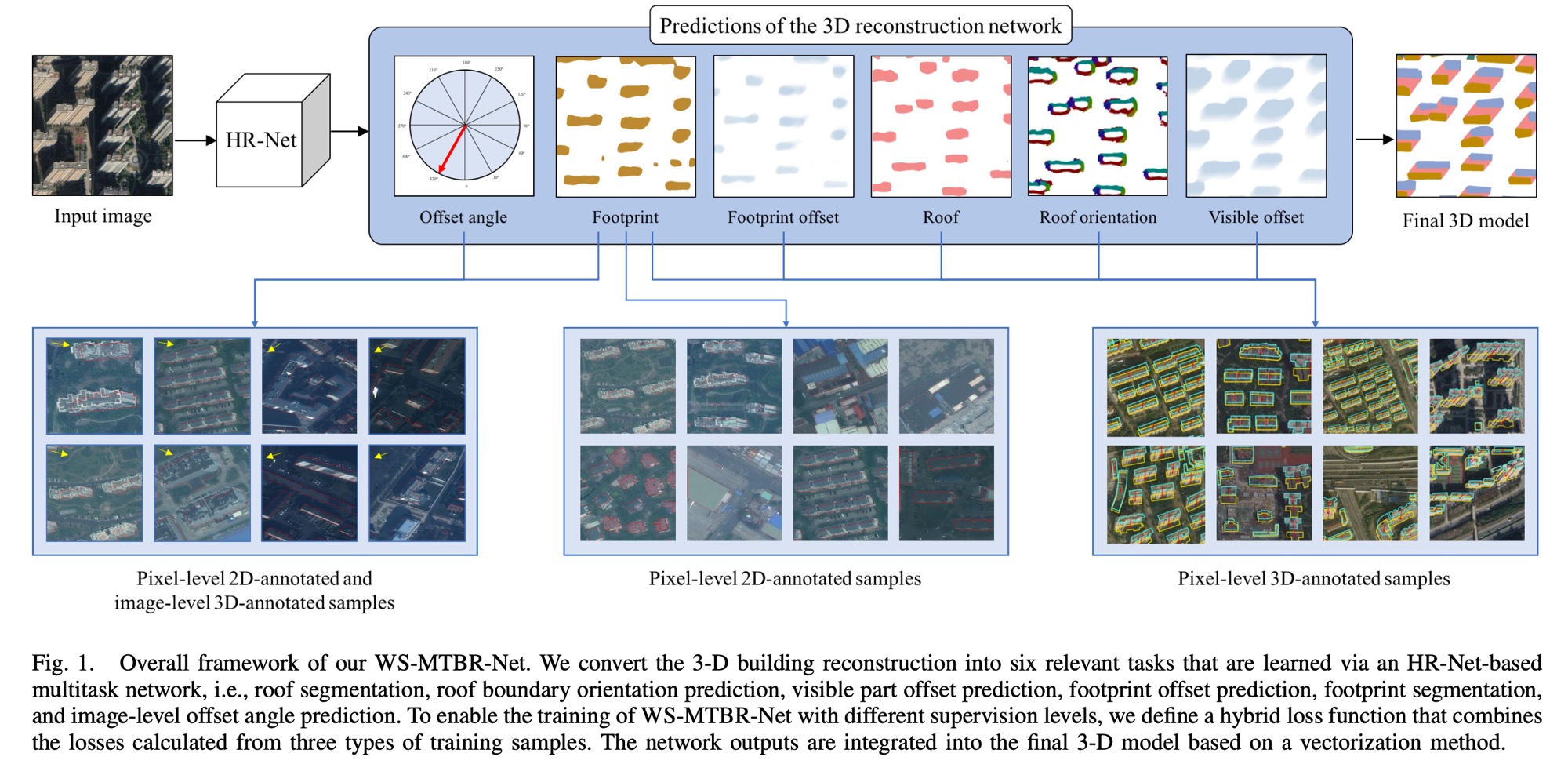
Weakly Supervised 3-D Building Reconstruction from Monocular Remote Sensing Images
Weijia Li, Zhenghao Hu, Lingxuan Meng, Jinwang Wang, Juepeng Zheng, Runmin Dong, Conghui He, Gui-Song Xia, Haohuan Fu, and Dahua Lin
TGRS, 2024.
Develops a weakly supervised framework for reconstructing 3D buildings from monocular remote sensing imagery, reducing reliance on dense 3D annotations.
-
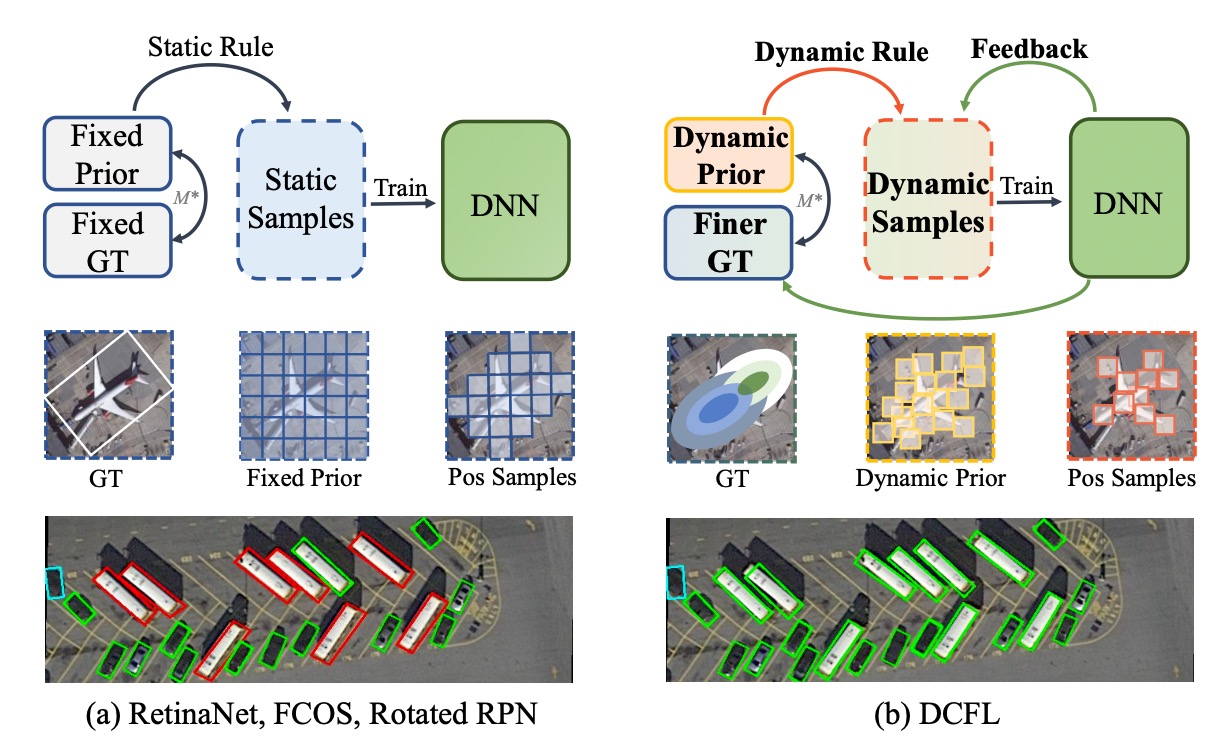
Dynamic Coarse-to-Fine Learning for Oriented Tiny Object Detection
Chang Xu, Jian Ding, Jinwang Wang, Wen Yang, Huai Yu, Lei Yu, and Gui-Song Xia
CVPR, 2023.
Proposes a dynamic coarse-to-fine learning strategy to improve oriented tiny object detection under extreme scale and localization uncertainty.
-
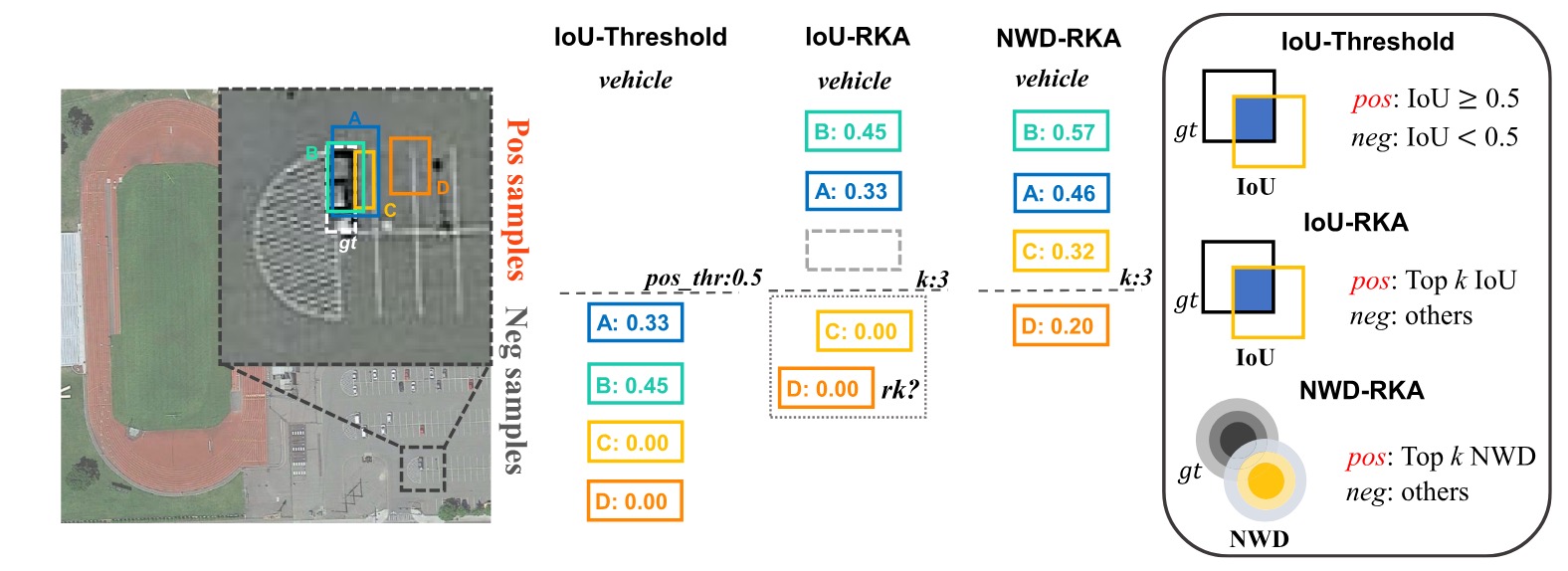
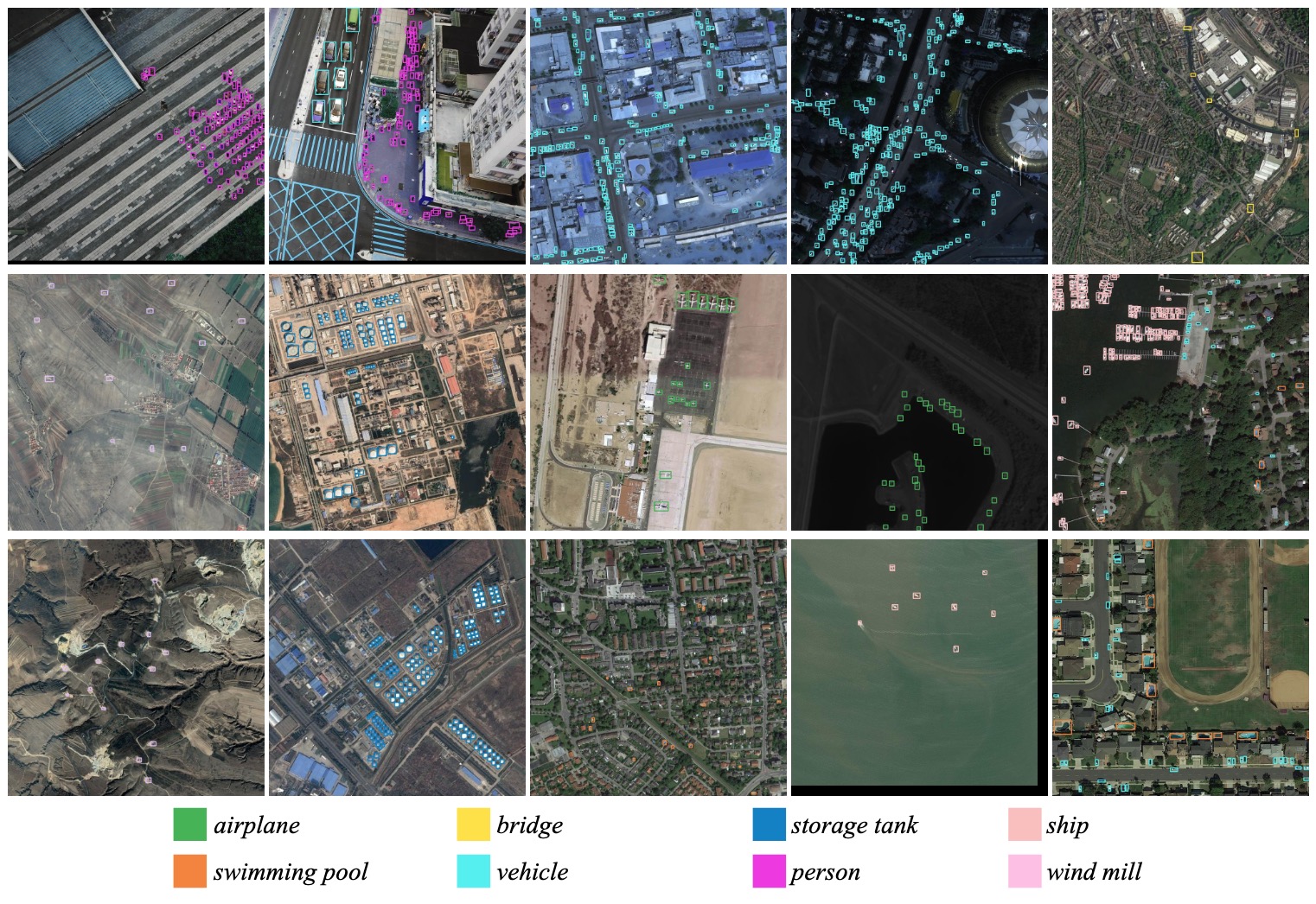
Detecting Tiny Objects in Aerial Images: A Normalized Wasserstein Distance and a New Benchmark
Chang Xu, Jinwang Wang, Wen Yang, Huai Yu, Lei Yu, and Gui-Song Xia
ISPRS JPRS, 2022.
Introduces the AI-TOD benchmark and Normalized Wasserstein Distance, establishing an evaluation and localization framework for aerial tiny object detection.
-
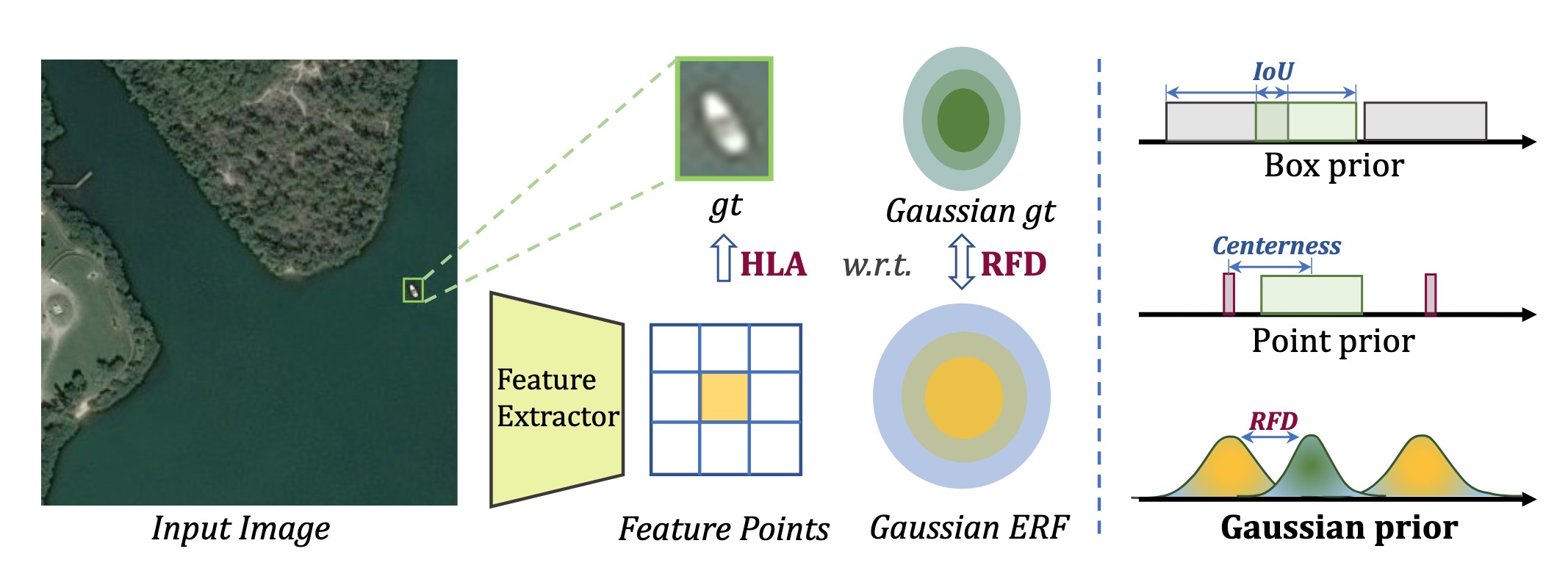
RFLA: Gaussian Receptive Field Based Label Assignment for Tiny Object Detection
Chang Xu, Jinwang Wang, Wen Yang, Huai Yu, Lei Yu, and Gui-Song Xia
ECCV, 2022.
Proposes Gaussian receptive field based label assignment to better match anchors with tiny objects under weak and noisy spatial overlaps.
-
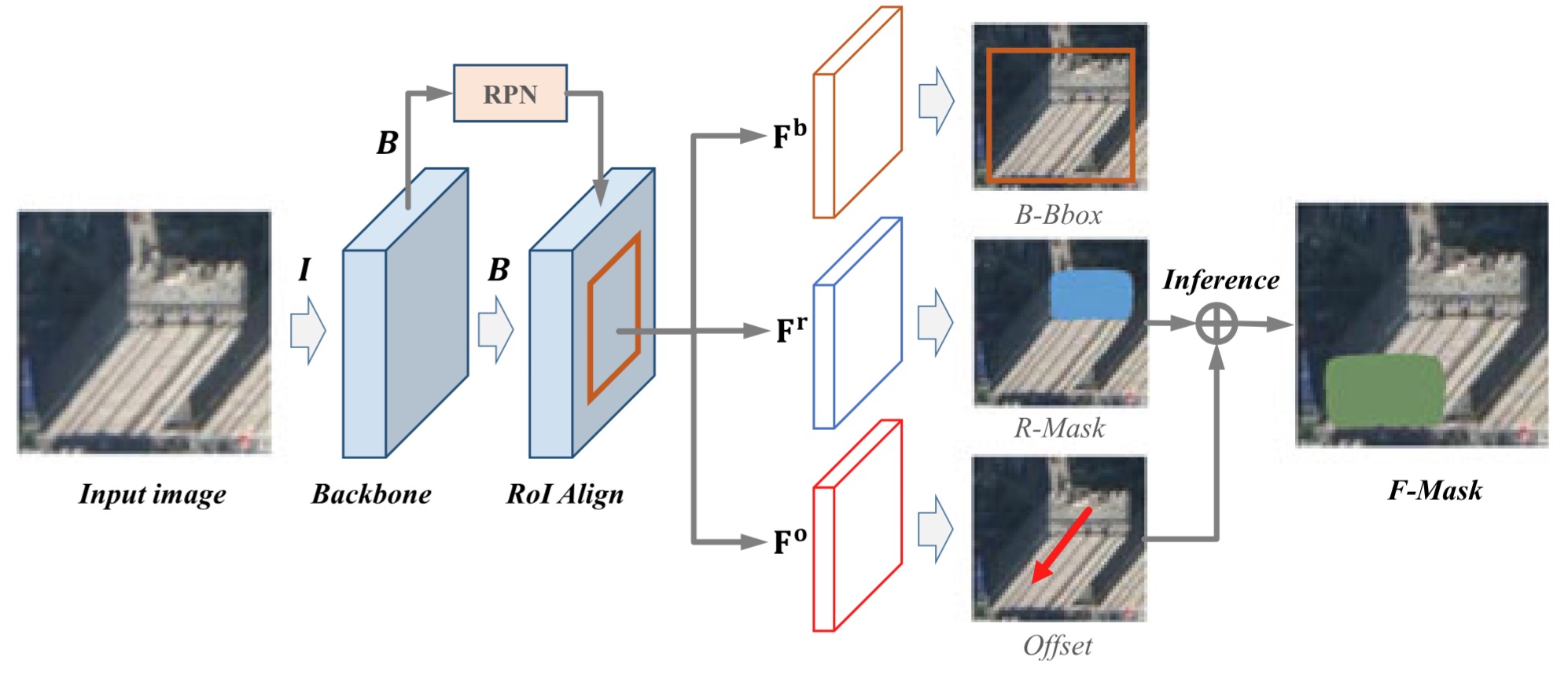
Learning to Extract Building Footprints from Off-Nadir Aerial Images
Jinwang Wang, Lingxuan Meng, Weijia Li, Wen Yang, Lei Yu, and Gui-Song Xia
TPAMI, 2022.
Introduces an end-to-end framework for extracting building footprints from off-nadir aerial images by handling roof-footprint misalignment.
-
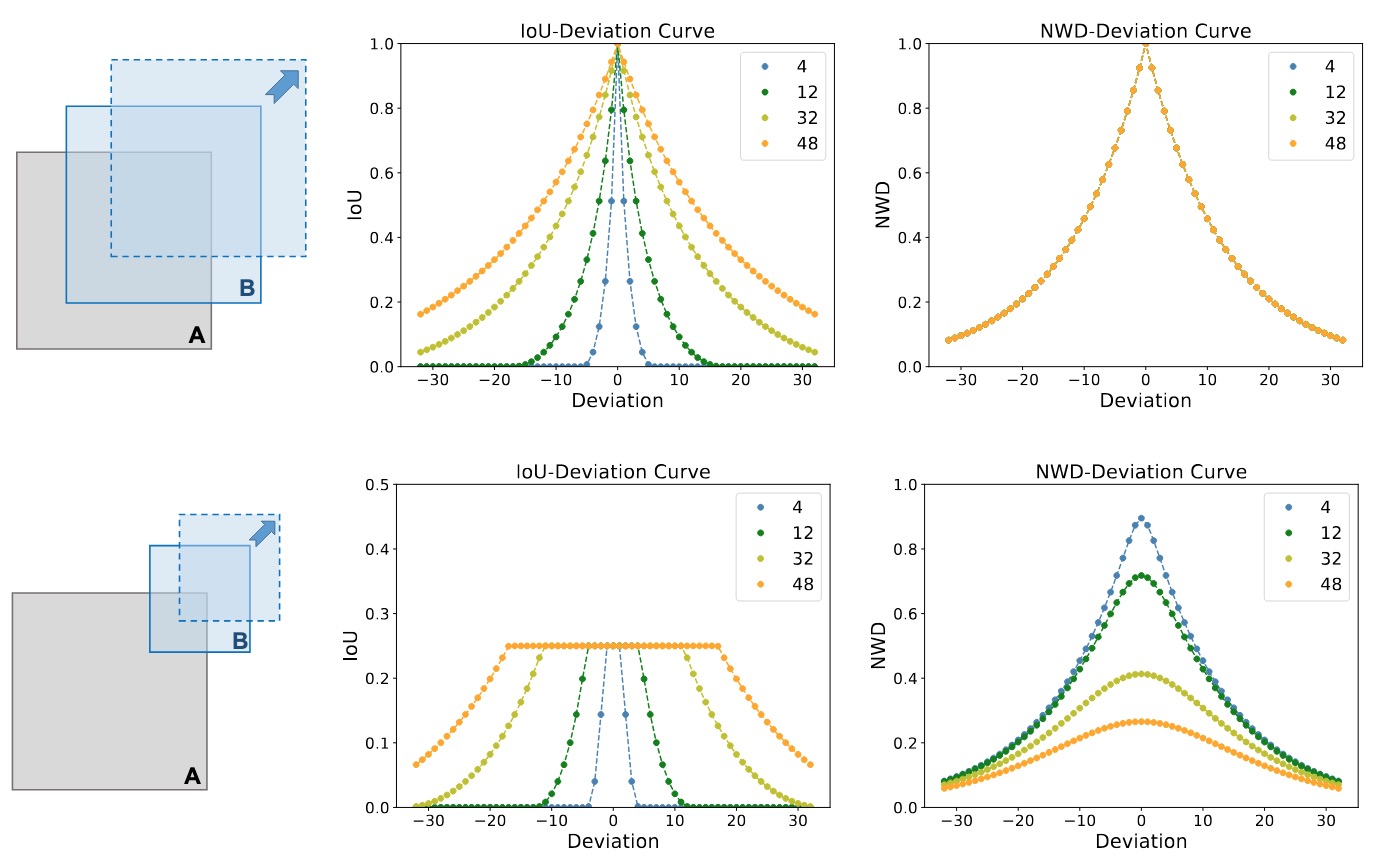
A Normalized Gaussian Wasserstein Distance for Tiny Object Detection
Jinwang Wang, Chang Xu, Wen Yang, and Lei Yu
arXiv, 2021.
Reformulates bounding-box similarity with Normalized Wasserstein Distance, addressing the scale-sensitive failure of IoU for tiny object detection.
-
Tiny Object Detection in Aerial Images
Jinwang Wang, Wen Yang, Haowen Guo, Ruixiang Zhang, and Gui-Song Xia
ICPR, 2021.
Defines aerial tiny object detection as a focused benchmark problem and introduces AI-TOD to expose failures of conventional detectors.
-
Dot Distance for Tiny Object Detection in Aerial Images
Chang Xu, Jinwang Wang, Wen Yang, and Lei Yu
CVPRW, 2021.
Proposes dot-distance based localization to represent and detect tiny objects more robustly when bounding boxes become unreliable.
-
3D Building Reconstruction from Monocular Remote Sensing Images
Weijia Li, Lingxuan Meng, Jinwang Wang, Conghui He, Gui-Song Xia, and Dahua Lin
ICCV, 2021.
Develops a monocular remote sensing approach for 3D building reconstruction, bridging 2D aerial imagery and structured urban geometry.
-
ULSD: Unified Line Segment Detection Across Pinhole, Fisheye, and Spherical Cameras
Hao Li, Huai Yu, Jinwang Wang, Wen Yang, Lei Yu, and Sebastian Scherer
ISPRS JPRS, 2021. (The U. V. Helava Award – Best Paper 2021; Core idea contribution)
Introduces a unified line segment detection framework that generalizes across pinhole, fisheye, and spherical camera models.
-
Learning Center Probability Map for Detecting Objects in Aerial Images
Jinwang Wang, Wen Yang, Heng-Chao Li, Haijian Zhang, and Gui-Song Xia
TGRS, 2020.
Proposes center probability maps for aerial object detection, improving localization by modeling center confidence in complex scenes.
-
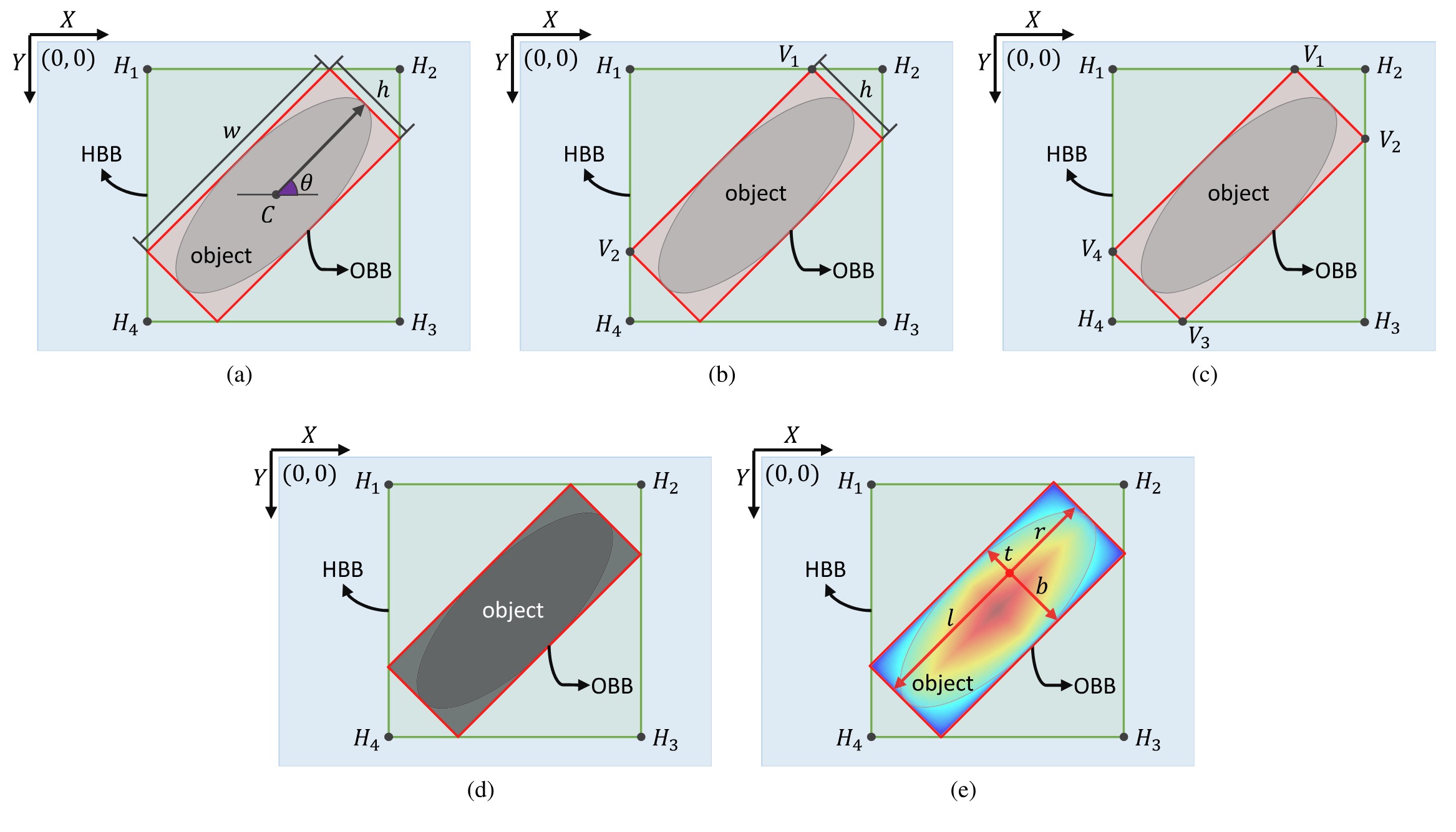
Mask OBB: A Semantic Attention-Based Mask Oriented Bounding Box Representation for Multi-Category Object Detection in Aerial Images
Jinwang Wang, Jian Ding, Haowen Guo, Wensheng Cheng, Ting Pan, and Wen Yang
Remote Sens., 2019.
Introduces a semantic attention based oriented bounding box representation for multi-category object detection in aerial images.
-
Development of an Autonomous Unmanned Aerial Manipulator Based on a Real-Time Oriented-Object Detection Method
Shijie Lin, Jinwang Wang, Rui Peng, and Wen Yang
Sensors, 2019.
Builds an autonomous unmanned aerial manipulator system powered by real-time oriented object detection for robotic aerial operation.
Honors & Awards
- Academic Innovation Second Prize Scholarship (Top 3%) — 2022
- Yu Gang & Song Xiao Scholarship (Top 1%) — 2020
- National Graduate Scholarship (Top 1%) — 2017, 2018
- National First Prize (TOP5) & Best Paper Award, Graduate Electronic Design Competition — 2018
- 6th Place & Finalist, ICRA & DJI RoboMaster AI/Robotics Challenge — 2017, 2018
- National Second Prize, Graduate Electronic Design Competition — 2017
- Chun-Tsung Scholar (Top 1%) — 2016
- Provincial Grand Prize, National Undergraduate Electronics Design Contest — 2015
- National Third Prize, Challenge Cup — 2015
- National Second Prize, National Mathematical Modeling Competition — 2014
- National Scholarship (Top 1%) — 2014
- National Encouragement Scholarship (Top 1%) — 2013, 2015
 Weakly Supervised 3-D Building Reconstruction from Monocular Remote Sensing ImagesTGRS, 2024.Develops a weakly supervised framework for reconstructing 3D buildings from monocular remote sensing imagery, reducing reliance on dense 3D annotations.
Weakly Supervised 3-D Building Reconstruction from Monocular Remote Sensing ImagesTGRS, 2024.Develops a weakly supervised framework for reconstructing 3D buildings from monocular remote sensing imagery, reducing reliance on dense 3D annotations.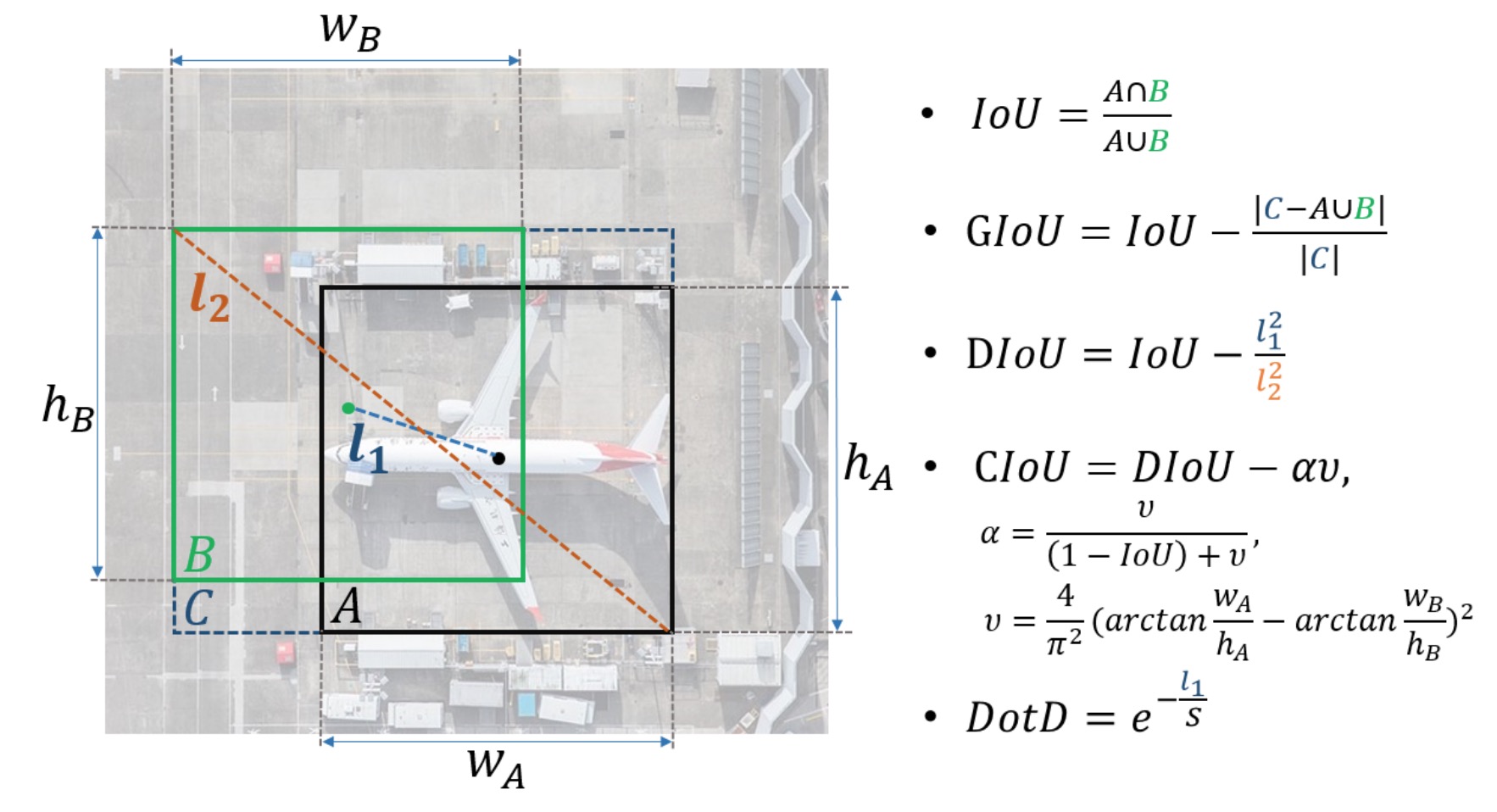 Dot Distance for Tiny Object Detection in Aerial ImagesCVPRW, 2021.Proposes dot-distance based localization to represent and detect tiny objects more robustly when bounding boxes become unreliable.
Dot Distance for Tiny Object Detection in Aerial ImagesCVPRW, 2021.Proposes dot-distance based localization to represent and detect tiny objects more robustly when bounding boxes become unreliable.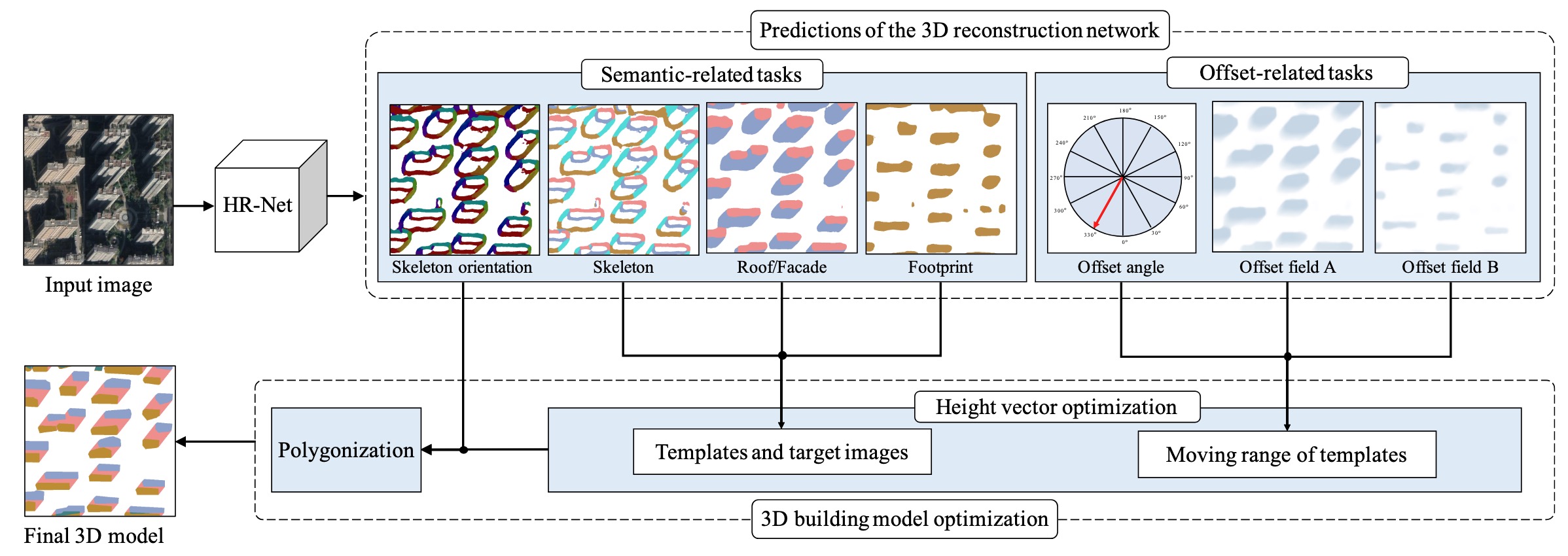 3D Building Reconstruction from Monocular Remote Sensing ImagesICCV, 2021.Develops a monocular remote sensing approach for 3D building reconstruction, bridging 2D aerial imagery and structured urban geometry.
3D Building Reconstruction from Monocular Remote Sensing ImagesICCV, 2021.Develops a monocular remote sensing approach for 3D building reconstruction, bridging 2D aerial imagery and structured urban geometry.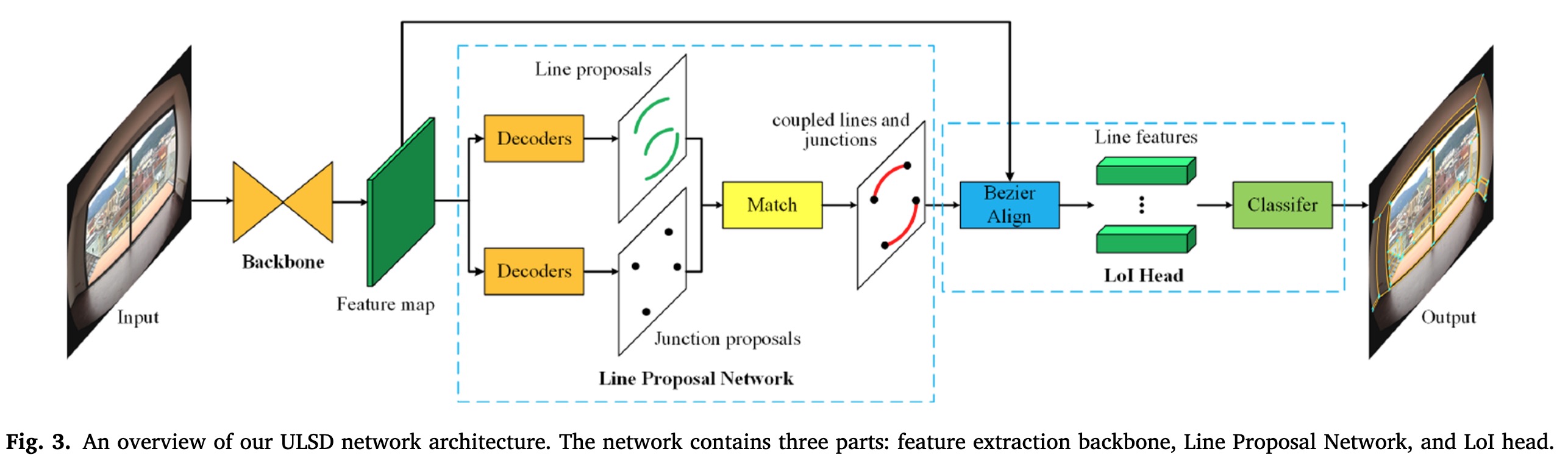 ULSD: Unified Line Segment Detection Across Pinhole, Fisheye, and Spherical CamerasISPRS JPRS, 2021. (The U. V. Helava Award – Best Paper 2021; Core idea contribution)Introduces a unified line segment detection framework that generalizes across pinhole, fisheye, and spherical camera models.
ULSD: Unified Line Segment Detection Across Pinhole, Fisheye, and Spherical CamerasISPRS JPRS, 2021. (The U. V. Helava Award – Best Paper 2021; Core idea contribution)Introduces a unified line segment detection framework that generalizes across pinhole, fisheye, and spherical camera models.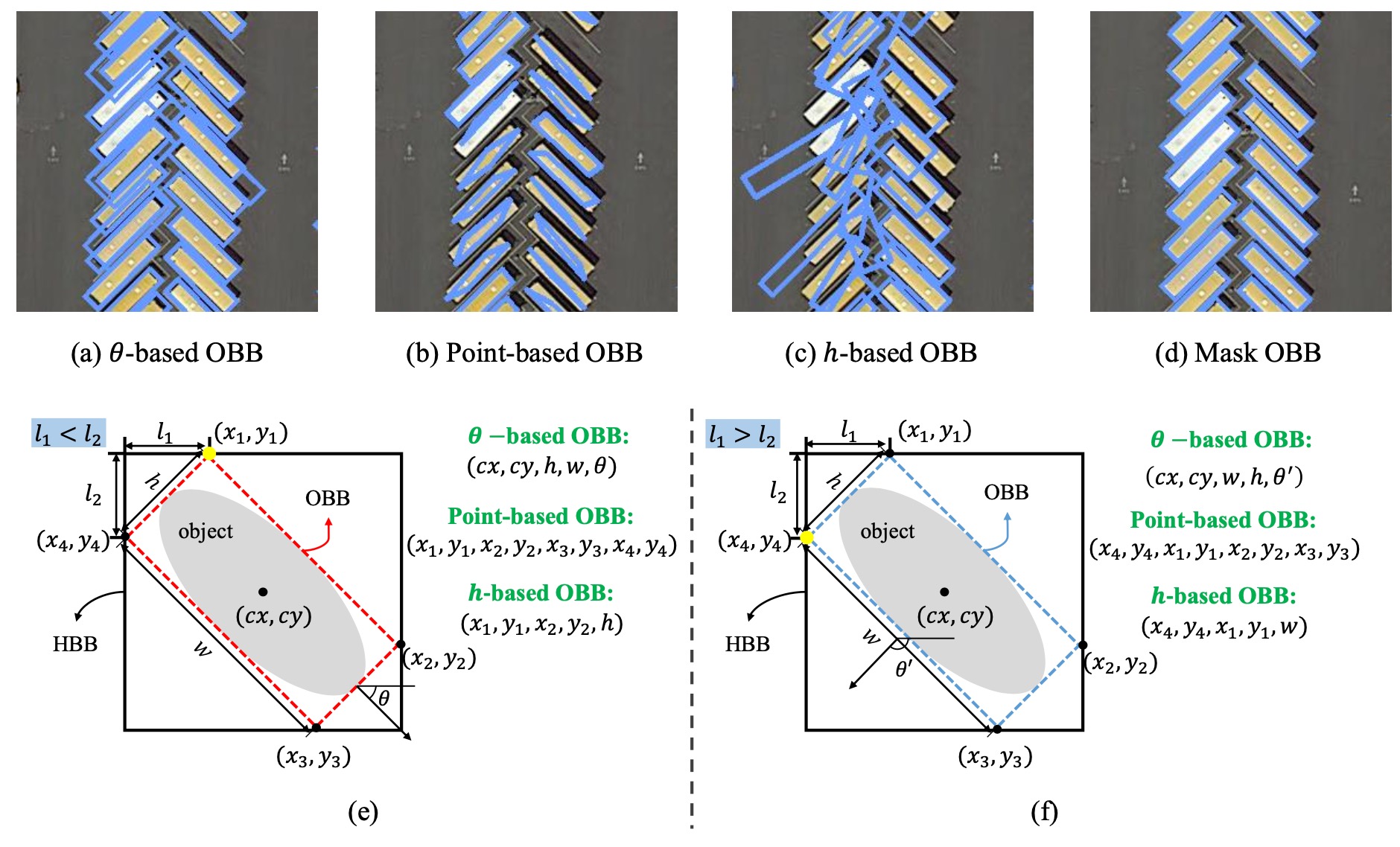 Mask OBB: A Semantic Attention-Based Mask Oriented Bounding Box Representation for Multi-Category Object Detection in Aerial ImagesRemote Sens., 2019.Introduces a semantic attention based oriented bounding box representation for multi-category object detection in aerial images.
Mask OBB: A Semantic Attention-Based Mask Oriented Bounding Box Representation for Multi-Category Object Detection in Aerial ImagesRemote Sens., 2019.Introduces a semantic attention based oriented bounding box representation for multi-category object detection in aerial images. Development of an Autonomous Unmanned Aerial Manipulator Based on a Real-Time Oriented-Object Detection MethodSensors, 2019.Builds an autonomous unmanned aerial manipulator system powered by real-time oriented object detection for robotic aerial operation.
Development of an Autonomous Unmanned Aerial Manipulator Based on a Real-Time Oriented-Object Detection MethodSensors, 2019.Builds an autonomous unmanned aerial manipulator system powered by real-time oriented object detection for robotic aerial operation.